UART with Interrupt
1. Introduction
In interrupt mode, the UART hardware generates an interrupt signal to the CPU when data is arrived (RX interrupt), data transmission is completed (TX interrupt) and even there are errors like parity error, framing error etc. It reduces the amount of time that we have to wait for data to be transmitted or received.
2. CubeMX Configuration
Open CubeMX and generate_basic_code with:
microcontroller:
stm32f407vgt6or board:STM32F407VG-DISC1project name:
uart_interruptToolchain/IDE:
Makefile
Move to STM32CubeMX
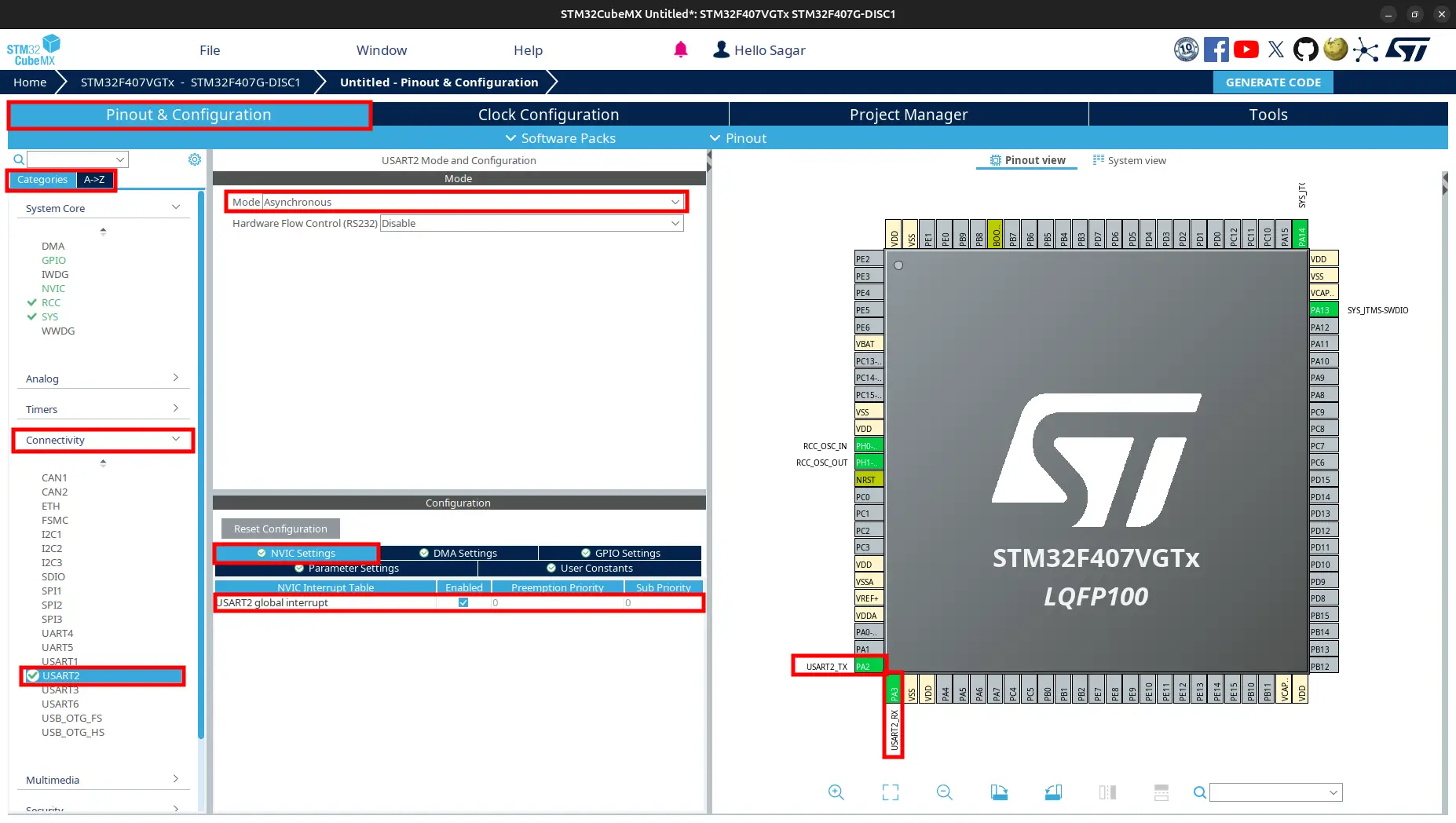
Pinout and Congiguration. FromCategories, selectConnectivity > USART2. ChangemodetoAsynchronousmode.Under
Configuration > NVIC Settings, enableUSART2 global interrupt.
Generate code and open the project.
3. Code to Send and Receive Data using UART Interrupt
Navigate to
Core > Srcand openmain.c.Include header file.
/* USER CODE BEGIN Includes */ #include <stdio.h> /* USER CODE END Includes */
/* USER CODE BEGIN Includes */ #include <stdio.h> #include "usbd_cdc_if.h" /* USER CODE END Includes */
Overwrite definition of
_writeas:/* USER CODE BEGIN 0 */ int _write(int file, char *data, int len) { for (int i = 0; i < len; ++i) { ITM_SendChar(data[i]); } return len; } /* USER CODE END 0 */
/* USER CODE BEGIN 0 */ int _write(int file, char *data, int len) { CDC_Transmit_FS((uint8_t*)data, (uint16_t)len); return len; } /* USER CODE END 0 */
Add global variable to store received data.
/* USER CODE BEGIN PV */ char c; /* USER
Add code for sending as well as receiving in
main()./* USER CODE BEGIN 2 */ char msg[] = "Hello from controller 1\n"; uint32_t last_transmit = 0; HAL_UART_Receive_IT(&huart2, (uint8_t *)&c, sizeof(c)); // Start receiving /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { if (HAL_GetTick() - last_transmit > 1000) { HAL_UART_Transmit_IT(&huart2, (uint8_t *)msg, sizeof(msg)); last_transmit = HAL_GetTick(); } if (!(HAL_UART_GetState(&huart2) & HAL_UART_STATE_BUSY_RX)) { HAL_UART_Receive_IT(&huart2, (uint8_t *)&c, sizeof(c)); // Start receiving in case of no reception } /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */
Add callback function for UART RX interrupt just above
main().void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if (huart->Instance == USART2) { printf("%c", c); HAL_UART_Receive_IT(&huart2, (uint8_t *)&c, sizeof(c)); // Receive again } } /* USER CODE END 0 */
Build and flash the code to both controllers.
4. Connection
Connect TX pin of sender to RX pin of receiver.
Connect GND of both controllers together.
References
References are from STM32 HAL Driver documentation.
- HAL_StatusTypeDef HAL_UART_Transmit_IT(huart, pData, Size)
Sends an amount of data in non-blocking mode.
When UART parity is not enabled (PCE = 0), and Word Length is configured to 9 bits (M1-M0 = 01), the sent data is handled as a set of u16. In this case, Size must indicate the number of u16 provided through pData.
- Parameters:
huart – Pointer to a UART_HandleTypeDef structure that contains the configuration information for the specified UART module.
pData – Pointer to data buffer (u8 or u16 data elements).
Size – Amount of data elements (u8 or u16) to be sent.
- Returns:
HAL status.
- HAL_StatusTypeDef HAL_UART_Receive_IT(huart, pData, Size)
Receives an amount of data in non-blocking mode.
When UART parity is not enabled (PCE = 0), and Word Length is configured to 9 bits (M1-M0 = 01), the received data is handled as a set of u16. In this case, Size must indicate the number of u16 available through pData.
- Parameters:
huart – Pointer to a UART_HandleTypeDef structure that contains the configuration information for the specified UART module.
pData – Pointer to data buffer (u8 or u16 data elements).
Size – Amount of data elements (u8 or u16) to be received.
- Returns:
HAL status.
Note
Interrupt mode IO operation
Send an amount of data in non-blocking mode using
HAL_UART_Transmit_IT().At the end of transmission, the callback
HAL_UART_TxCpltCallbackis executed, allowing the user to add custom code by customizing this function pointer.Receive an amount of data in non-blocking mode using
HAL_UART_Receive_IT().At the end of reception, the callback
HAL_UART_RxCpltCallbackis executed, allowing the user to add custom code by customizing this function pointer.In case of transfer error, the function
HAL_UART_ErrorCallback()is executed, allowing the user to add custom code by customizing this function pointer.