 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
#include "main.h"#include "cmsis_os.h"#include "adc.h"#include "dma.h"#include "i2c.h"#include "tim.h"#include "usart.h"#include "usb_device.h"#include "gpio.h"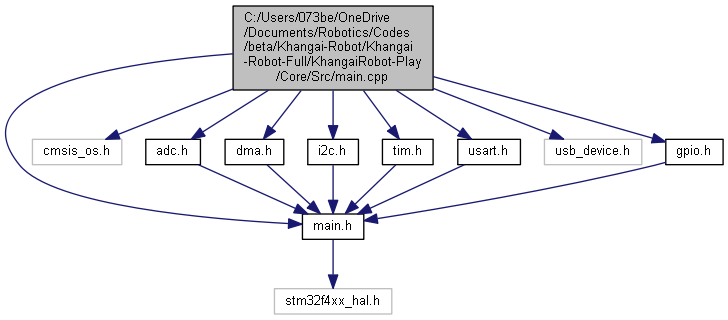
Functions | |
| void | SystemClock_Config (void) |
| System Clock Configuration. More... | |
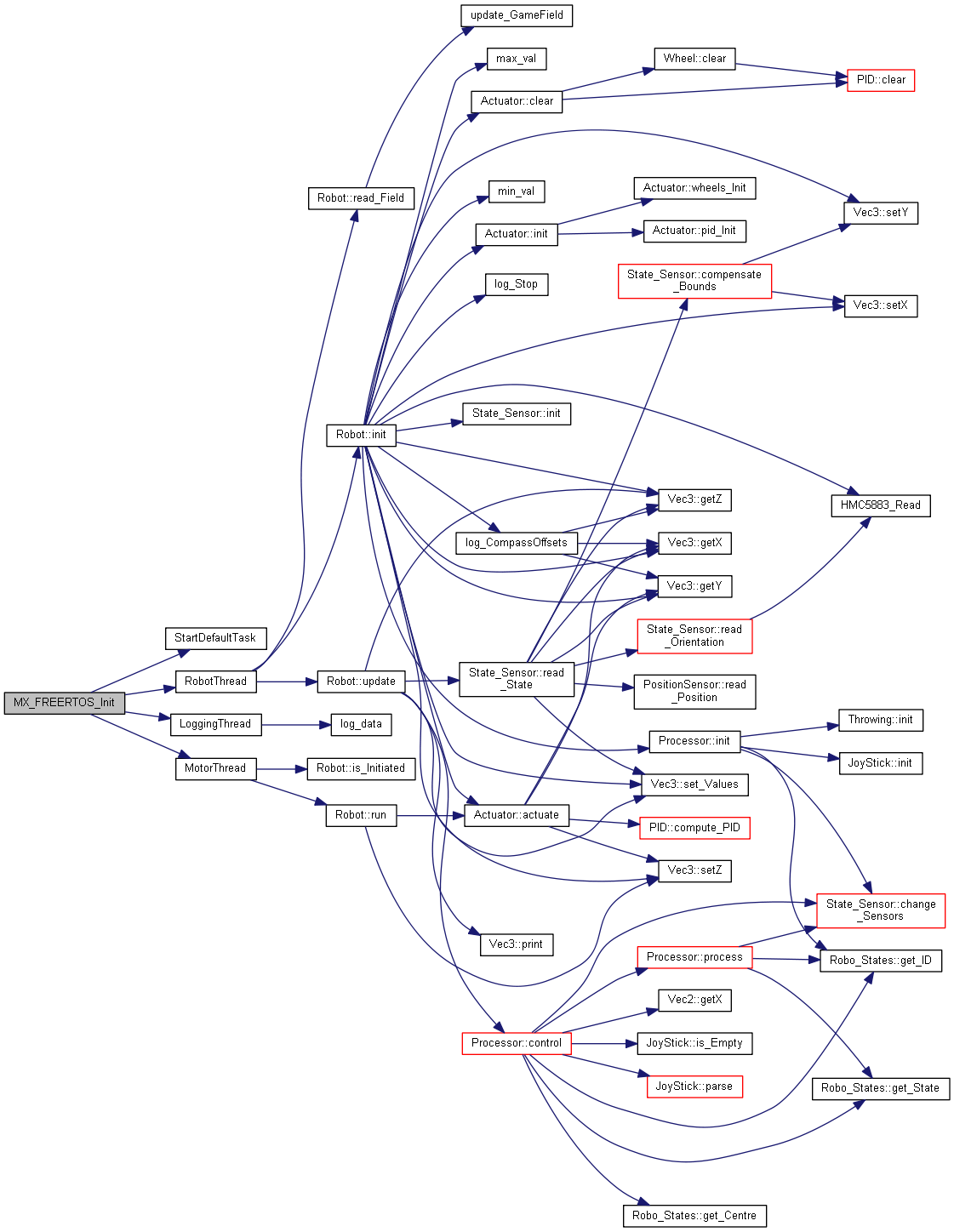
| void | MX_FREERTOS_Init (void) |
| FreeRTOS initialization. More... | |
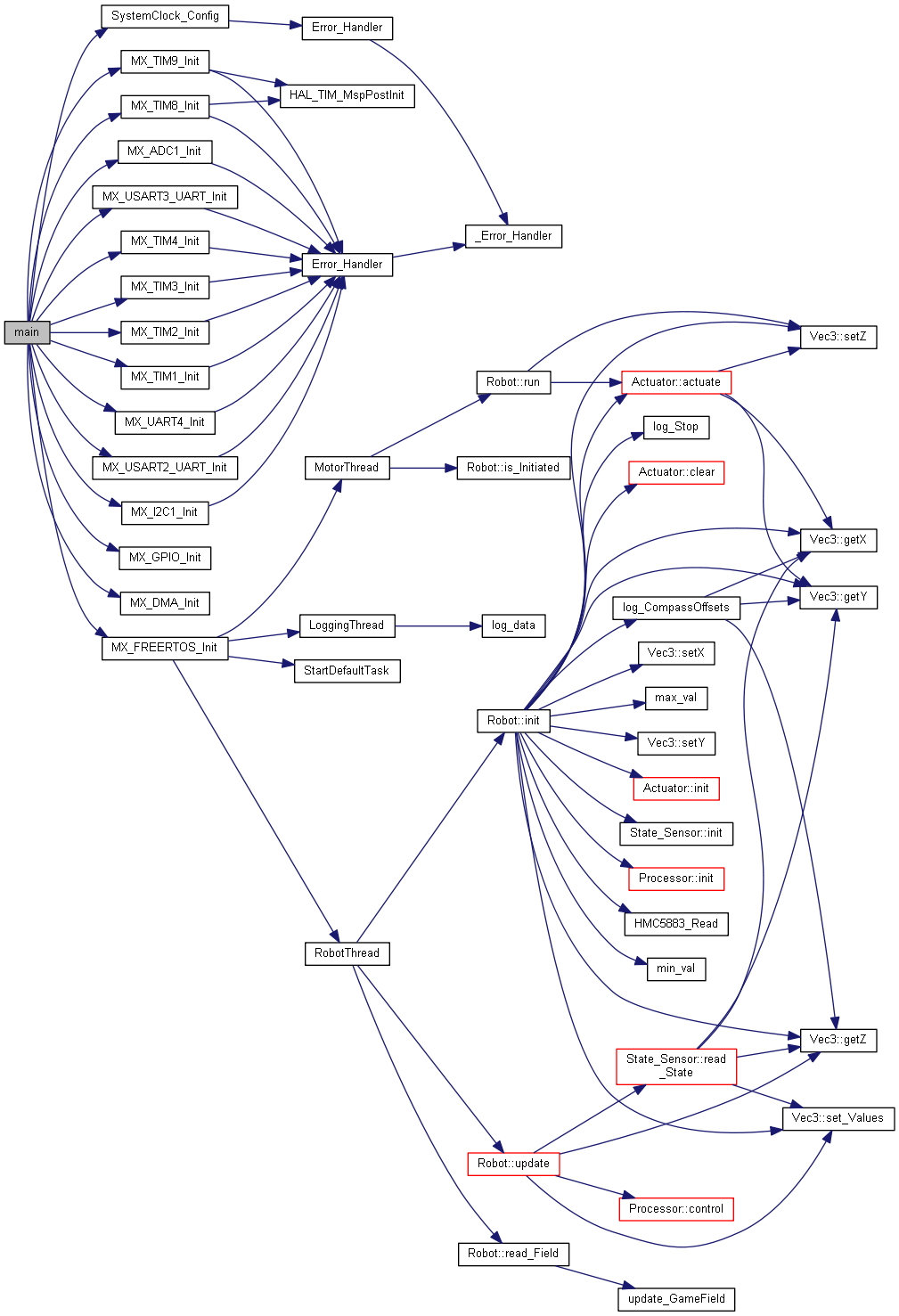
| int | main (void) |
| The application entry point. More... | |
| void | HAL_TIM_PeriodElapsedCallback (TIM_HandleTypeDef *htim) |
| Period elapsed callback in non blocking mode. More... | |
| void | Error_Handler (void) |
| This function is executed in case of error occurrence. More... | |
| void | _Error_Handler (const char *file, size_t line) |
| void _Error_Handler | ( | const char * | file, |
| size_t | line | ||
| ) |
| void Error_Handler | ( | void | ) |
This function is executed in case of error occurrence.
| None |

| void HAL_TIM_PeriodElapsedCallback | ( | TIM_HandleTypeDef * | htim | ) |
Period elapsed callback in non blocking mode.
| htim | : TIM handle |
| None |
| int main | ( | void | ) |
The application entry point.
| int |
| void MX_FREERTOS_Init | ( | void | ) |
FreeRTOS initialization.
| None |
| None |
| void SystemClock_Config | ( | void | ) |
System Clock Configuration.
| None |
Configure the main internal regulator output voltage
Initializes the CPU, AHB and APB busses clocks
Initializes the CPU, AHB and APB busses clocks


 1.8.15
1.8.15