Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
Functions
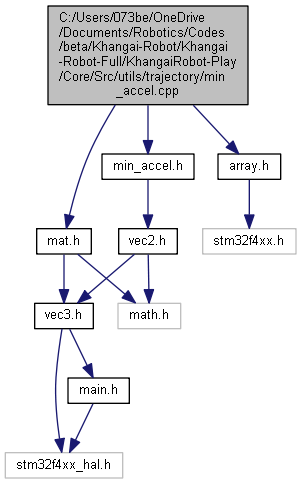
min_accel.cpp File Reference
#include "
min_accel.h
"
#include "
mat.h
"
#include "
array.h
"
Include dependency graph for min_accel.cpp:
Functions
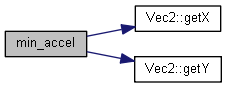
void
min_accel
(float(&poly)[4],
Vec2
< float > pos,
Vec2
< float > vel, float Tp)
Function Documentation
◆
min_accel()
void min_accel
(
float(&)
poly
[4],
Vec2
< float >
pos
,
Vec2
< float >
vel
,
float
Tp
)
Here is the call graph for this function:
Core
Src
utils
trajectory
min_accel.cpp
Generated by
1.8.15

 1.8.15
1.8.15