 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
#include <math.h>#include "actuator.h"#include "pid_algorithms.h"#include "pid.h"#include "mat.h"#include "logger.h"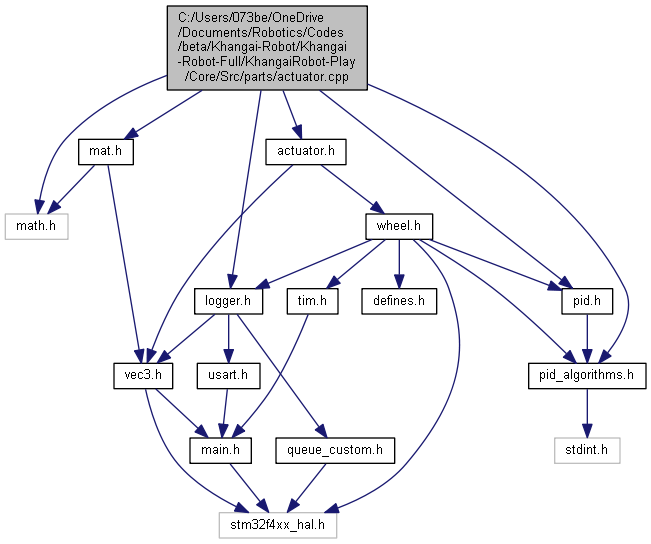
Macros | |
| #define | WHEEL_RADIUS (0.0675) |
Variables | |
| const float | gCoupling_Array [4][3] |
| const float | gInverse_Coupling_Array [3][4] |
| #define WHEEL_RADIUS (0.0675) |
| const float gCoupling_Array[4][3] |
| const float gInverse_Coupling_Array[3][4] |
 1.8.15
1.8.15