 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
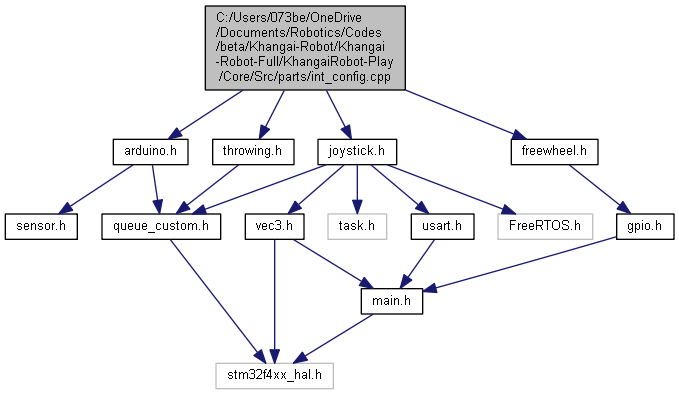
Functions | |
| void | Logging_Handle_TxCplt () |
| void | HAL_GPIO_EXTI_Callback (uint16_t GPIO_Pin) |
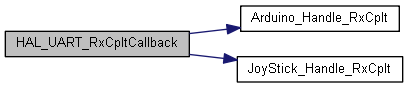
| void | HAL_UART_RxCpltCallback (UART_HandleTypeDef *huart) |
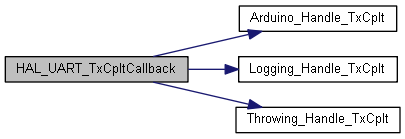
| void | HAL_UART_TxCpltCallback (UART_HandleTypeDef *huart) |
| void | HAL_UART_IRQCallback (UART_HandleTypeDef *huart) |
Variables | |
| struct Enc | gXEnc |
| struct Enc | gYEnc |
| void HAL_GPIO_EXTI_Callback | ( | uint16_t | GPIO_Pin | ) |

| void HAL_UART_IRQCallback | ( | UART_HandleTypeDef * | huart | ) |
| void HAL_UART_RxCpltCallback | ( | UART_HandleTypeDef * | huart | ) |
| void HAL_UART_TxCpltCallback | ( | UART_HandleTypeDef * | huart | ) |
| void Logging_Handle_TxCplt | ( | ) |
| struct Enc gXEnc |
| struct Enc gYEnc |
 1.8.15
1.8.15