 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
#include "vec3.h"#include "usart.h"#include "queue_custom.h"#include "FreeRTOS.h"#include "task.h"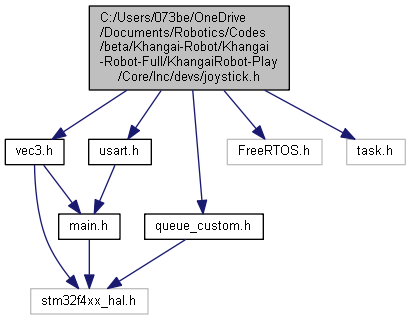
Go to the source code of this file.
Classes | |
| struct | JoyStick_Data |
| struct | JoyStick_Handle |
| struct | JoyStick_Command |
| class | JoyStick |
Macros | |
| #define | B_X (7) |
| #define | B_Y (6) |
| #define | B_A (5) |
| #define | B_B (4) |
| #define | B_UP (3) |
| #define | B_DOWN (2) |
| #define | B_LB (1) |
| #define | B_RB (0) |
| #define | B_START (7) |
| #define | B_BACK (6) |
| #define | B_XBOX (5) |
| #define | B_LEFT (4) |
| #define | B_RIGHT (3) |
| #define | MANUAL_KEY (B_LB) |
| #define | AUTO_KEY (B_A) |
| #define | RESET_KEY (B_RB) |
| #define | SHAGAI_GRIP_KEY (B_X) |
| #define | THROW_SHAGAI_KEY (B_Y) |
| #define | ACTUATE_ARM_KEY (B_B) |
| #define | START_THROW_KEY (B_START) |
| #define | _BV(x) (1 << x) |
Enumerations | |
| enum | Control_Mode { Control_Mode::MANUAL, Control_Mode::AUTO, Control_Mode::NONE } |
Functions | |
| void | JoyStick_Handle_RxCplt () |
| #define _BV | ( | x | ) | (1 << x) |
| #define ACTUATE_ARM_KEY (B_B) |
| #define AUTO_KEY (B_A) |
| #define B_A (5) |
| #define B_B (4) |
| #define B_BACK (6) |
| #define B_DOWN (2) |
| #define B_LB (1) |
| #define B_LEFT (4) |
| #define B_RB (0) |
| #define B_RIGHT (3) |
| #define B_START (7) |
| #define B_UP (3) |
| #define B_X (7) |
| #define B_XBOX (5) |
| #define B_Y (6) |
| #define MANUAL_KEY (B_LB) |
| #define RESET_KEY (B_RB) |
| #define SHAGAI_GRIP_KEY (B_X) |
| #define START_THROW_KEY (B_START) |
| #define THROW_SHAGAI_KEY (B_Y) |
|
strong |
| void JoyStick_Handle_RxCplt | ( | ) |
 1.8.15
1.8.15