 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
#include "stm32f4xx_hal.h"#include "tim.h"#include "defines.h"#include "pid_algorithms.h"#include "pid.h"#include "logger.h"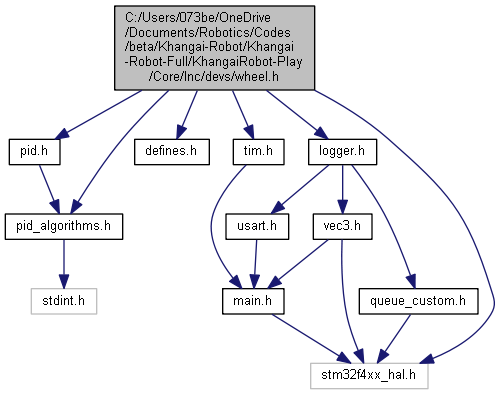
Go to the source code of this file.
Classes | |
| struct | Wheel_Config |
| class | Wheel |
Enumerations | |
| enum | Direction { AHEAD, BACK, HALT } |
| enum Direction |
 1.8.15
1.8.15