 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
#include "joystick.h"#include "defines.h"#include "array.h"#include "crc_hash.h"#include "logger.h"#include <math.h>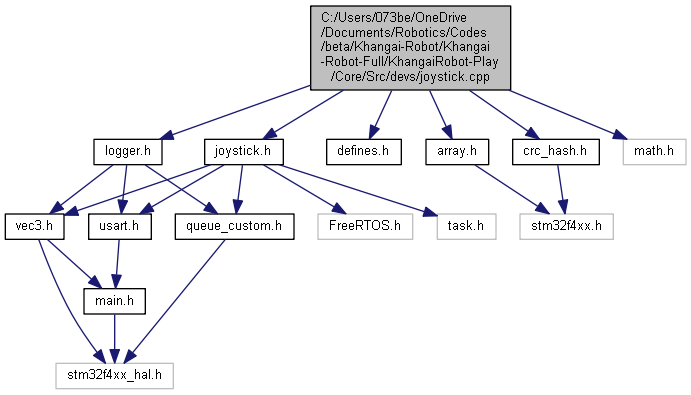
Macros | |
| #define | JOYSTICK_START_BYTE (START_BYTE) |
| #define | NUM_JOYSTICK_BYTES (8) |
Functions | |
| void | JoyStick_Handle_RxCplt () |
Variables | |
| JoyStick_Data | gJoy |
| uint8_t | gJoy_Data_Arr [NUM_JOYSTICK_BYTES] |
| #define JOYSTICK_START_BYTE (START_BYTE) |
| #define NUM_JOYSTICK_BYTES (8) |
| void JoyStick_Handle_RxCplt | ( | ) |
| JoyStick_Data gJoy |
| uint8_t gJoy_Data_Arr[NUM_JOYSTICK_BYTES] |
 1.8.15
1.8.15