 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
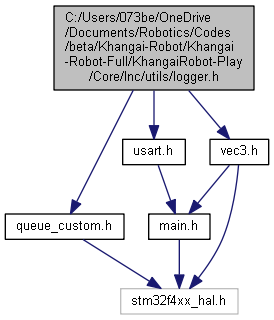
Go to the source code of this file.
Macros | |
| #define | LOG_BUFFER_SIZE (20*1024) |
Functions | |
| void | log_Stop () |
| void | log_Angle (float psi, float rw) |
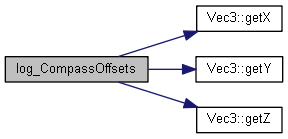
| void | log_CompassOffsets (Vec3< float > offsets) |
| void | log_JoyStickError (uint32_t err_count) |
Variables | |
| Queue< uint8_t, LOG_BUFFER_SIZE > | gLogging_Buffer |
| #define LOG_BUFFER_SIZE (20*1024) |
| void log_Angle | ( | float | psi, |
| float | rw | ||
| ) |
| void log_CompassOffsets | ( | Vec3< float > | offsets | ) |
| void log_JoyStickError | ( | uint32_t | err_count | ) |
| void log_Stop | ( | ) |
| Queue<uint8_t, LOG_BUFFER_SIZE> gLogging_Buffer |
 1.8.15
1.8.15