 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
Functions | |
| int8_t | MPU6050_Init (struct MPU6050 *mpu) |
| int8_t | MPU6050_Read_RawAccel (struct MPU6050 *mpu) |
| int8_t | MPU6050_Read_RawGyro (struct MPU6050 *mpu) |
| int8_t | MPU6050_Read_Temp (struct MPU6050 *mpu) |
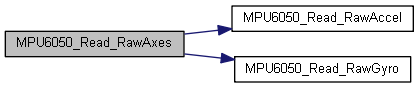
| int8_t | MPU6050_Read_RawAxes (struct MPU6050 *mpu) |
| int8_t | MPU6050_Read_NormAccel (struct MPU6050 *mpu) |
| int8_t | MPU6050_Read_NormGyro (struct MPU6050 *mpu) |
| int8_t | MPU6050_Read_NormAxes (struct MPU6050 *mpu) |
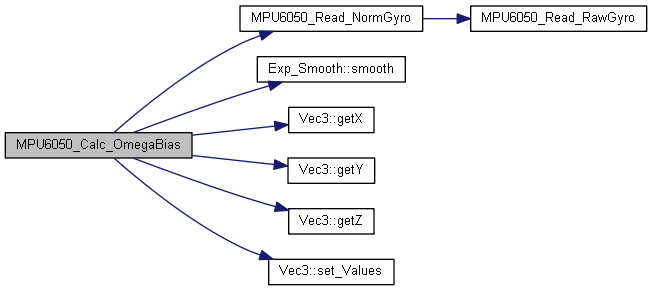
| Vec3< float > | MPU6050_Calc_OmegaBias (struct MPU6050 *mpu, uint32_t n) |
| int8_t MPU6050_Init | ( | struct MPU6050 * | mpu | ) |
| int8_t MPU6050_Read_NormAccel | ( | struct MPU6050 * | mpu | ) |

| int8_t MPU6050_Read_NormAxes | ( | struct MPU6050 * | mpu | ) |

| int8_t MPU6050_Read_NormGyro | ( | struct MPU6050 * | mpu | ) |

| int8_t MPU6050_Read_RawAccel | ( | struct MPU6050 * | mpu | ) |
| int8_t MPU6050_Read_RawAxes | ( | struct MPU6050 * | mpu | ) |
| int8_t MPU6050_Read_RawGyro | ( | struct MPU6050 * | mpu | ) |
| int8_t MPU6050_Read_Temp | ( | struct MPU6050 * | mpu | ) |
 1.8.15
1.8.15