 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
#include "position_sensor.h"#include "smoothing_algorithm.h"#include "devs_config.h"#include "error.h"#include "defines.h"#include "robo_states.h"#include "bridge.h"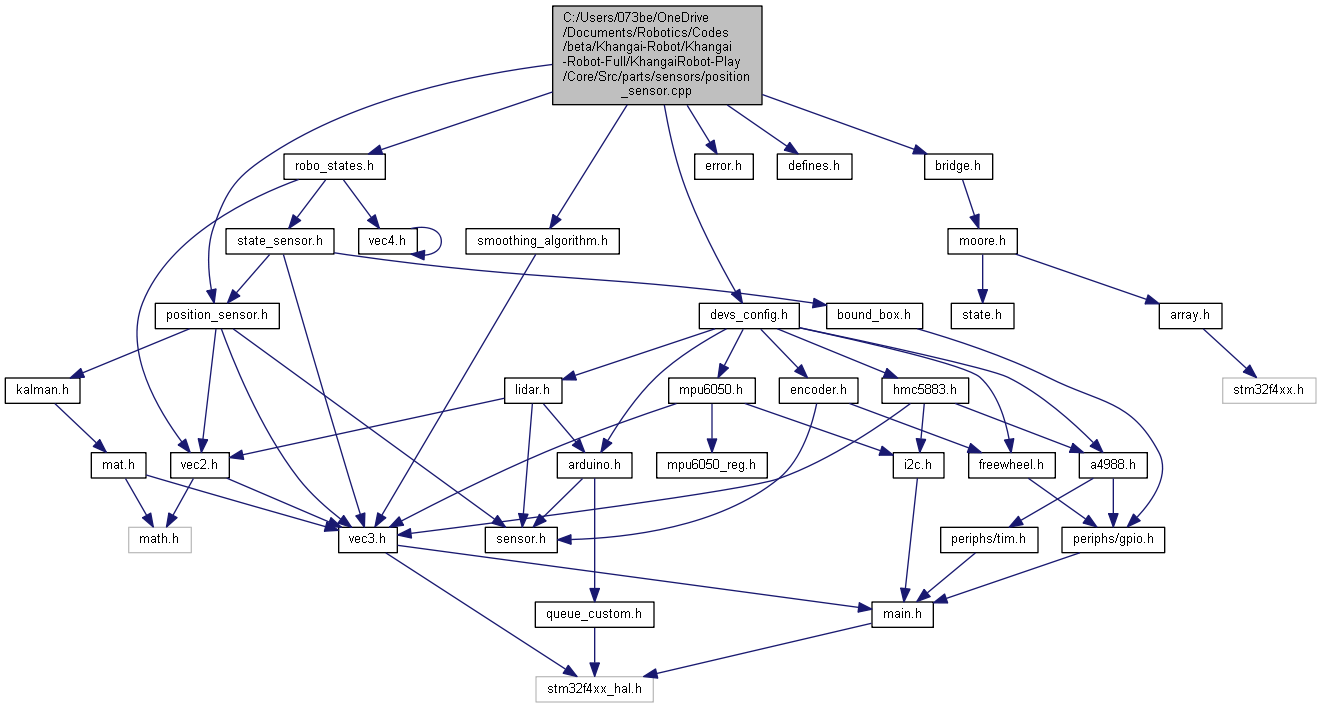
Functions | |
| int | init_XLidarEncoderKalman (uint32_t dt_millis) |
| int | init_YLidarEncoderKalman (uint32_t dt_millis) |
| int | init_EncodersKalman (uint32_t dt_millis) |
Variables | |
| float | gLast_YEncoderValue = 300 |
| Vec3< float > | gLastPosition (gLast_XEncoderValue, gLast_YEncoderValue, 0) |
| Kalman_Vars | gEncoders_KV |
| Kalman_Vars | gXLidarEncoder_KV |
| Kalman_Vars | gYLidarEncoder_KV |
| int init_EncodersKalman | ( | uint32_t | dt_millis | ) |
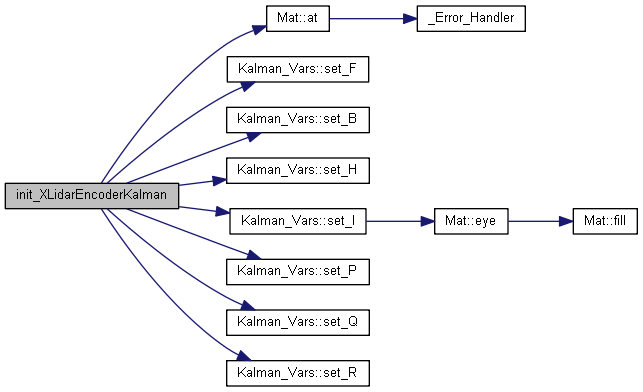
| int init_XLidarEncoderKalman | ( | uint32_t | dt_millis | ) |
| int init_YLidarEncoderKalman | ( | uint32_t | dt_millis | ) |

| Kalman_Vars gEncoders_KV |
| float gLast_YEncoderValue = 300 |
| Vec3<float> gLastPosition(gLast_XEncoderValue, gLast_YEncoderValue, 0) |
| Kalman_Vars gXLidarEncoder_KV |
| Kalman_Vars gYLidarEncoder_KV |
 1.8.15
1.8.15