 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
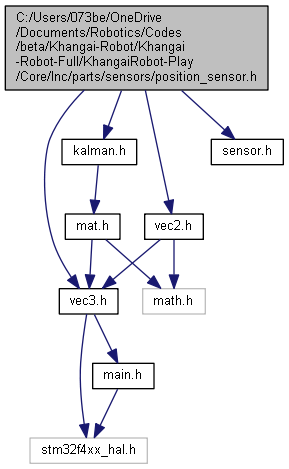
Go to the source code of this file.
Classes | |
| class | PositionSensor |
Macros | |
| #define | MAX_POSITION_SENSORS (4) |
Functions | |
| int | init_XLidarEncoderKalman (uint32_t dt_millis) |
| int | init_YLidarEncoderKalman (uint32_t dt_millis) |
| int | init_EncodersKalman (uint32_t dt_millis) |
Variables | |
| Kalman_Vars | gEncoders_KV |
| Kalman_Vars | gXLidarEncoder_KV |
| Kalman_Vars | gYLidarEncoder_KV |
| #define MAX_POSITION_SENSORS (4) |
| int init_EncodersKalman | ( | uint32_t | dt_millis | ) |
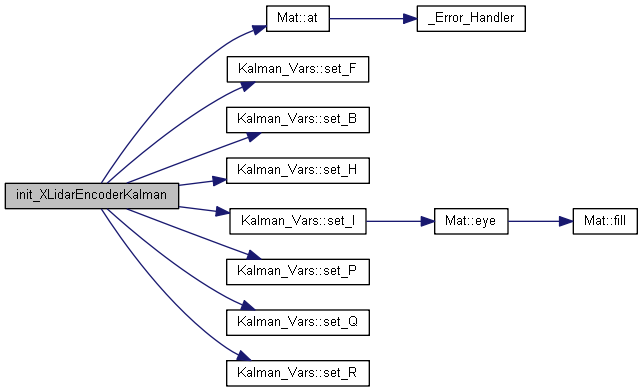
| int init_XLidarEncoderKalman | ( | uint32_t | dt_millis | ) |
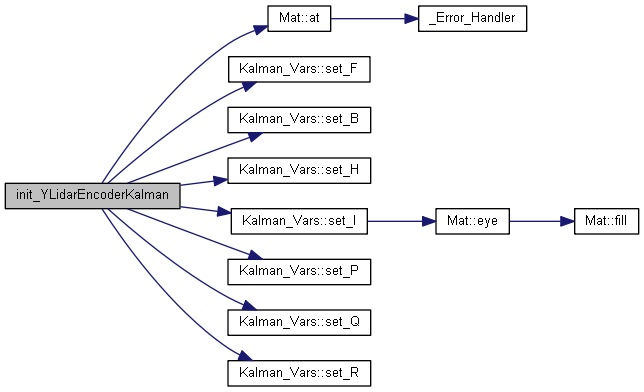
| int init_YLidarEncoderKalman | ( | uint32_t | dt_millis | ) |
| Kalman_Vars gEncoders_KV |
| Kalman_Vars gXLidarEncoder_KV |
| Kalman_Vars gYLidarEncoder_KV |
 1.8.15
1.8.15