 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
#include "robot.h"#include "main.h"#include "FreeRTOS.h"#include "task.h"#include "joystick.h"#include "array.h"#include "devs_config.h"#include "logger.h"#include "utils.h"#include "defines.h"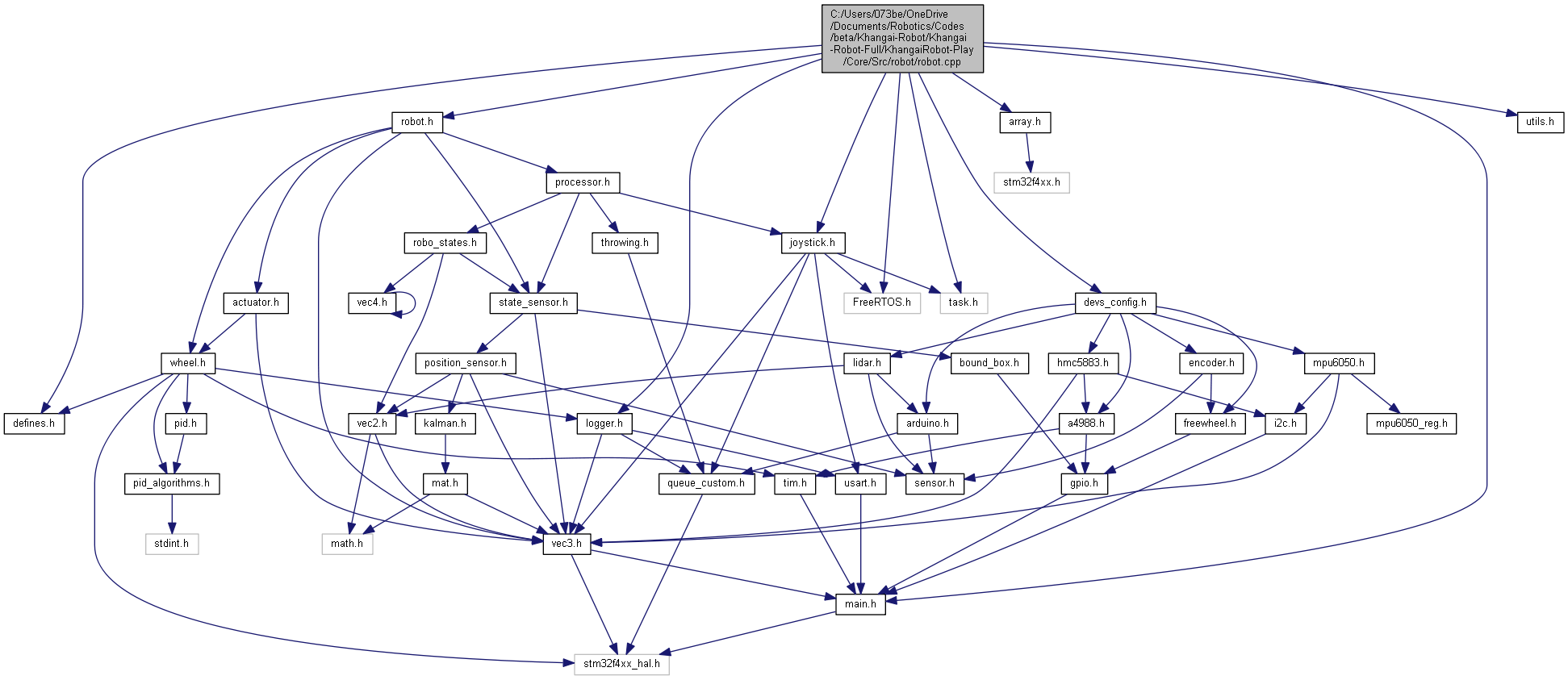
Functions | |
| void | update_GameField (GameField field) |
Variables | |
| State_Vars | gStateA_Data |
| State_Vars | gStateO_Data |
| void update_GameField | ( | GameField | field | ) |
| State_Vars gStateA_Data |
| State_Vars gStateO_Data |
 1.8.15
1.8.15