 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
A Singleton class that handles all the robot's sequence. More...
#include <robot.h>
Public Member Functions | |
| Robot (Robot &&)=default | |
| Robot (const Robot &)=default | |
| Robot & | operator= (Robot &&)=default |
| Robot & | operator= (const Robot &)=default |
| ~Robot () | |
| void | read_Field () |
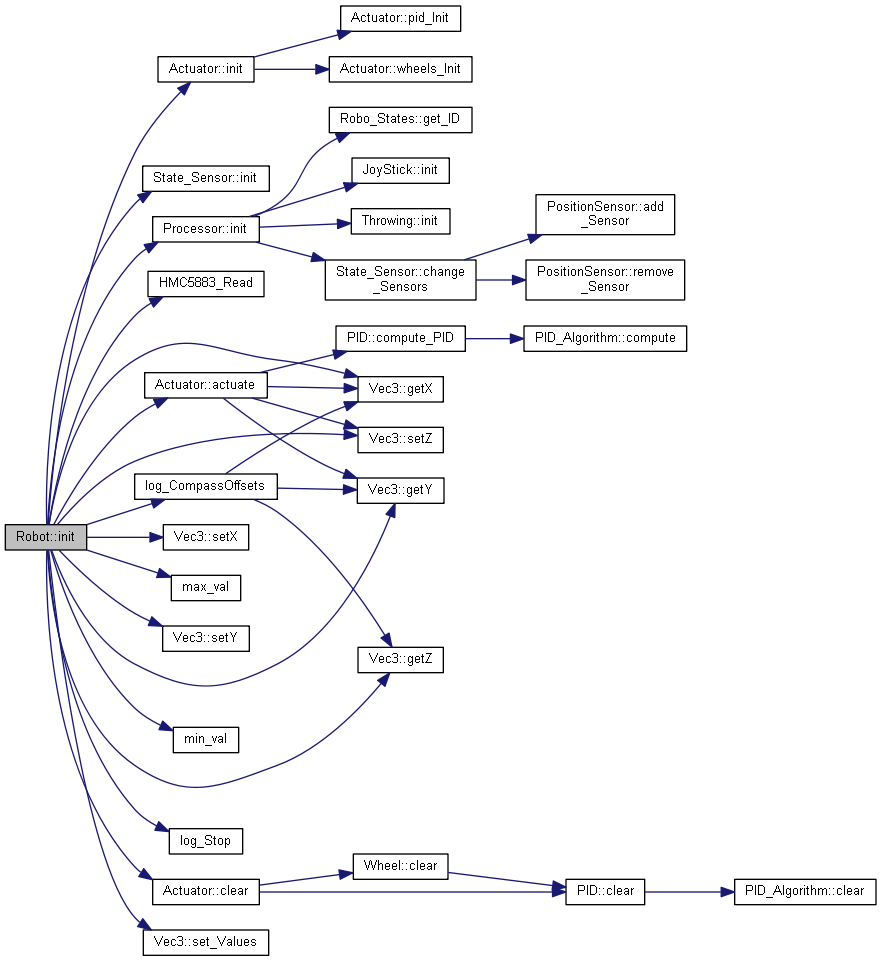
| int | init (uint32_t dt_millis) |
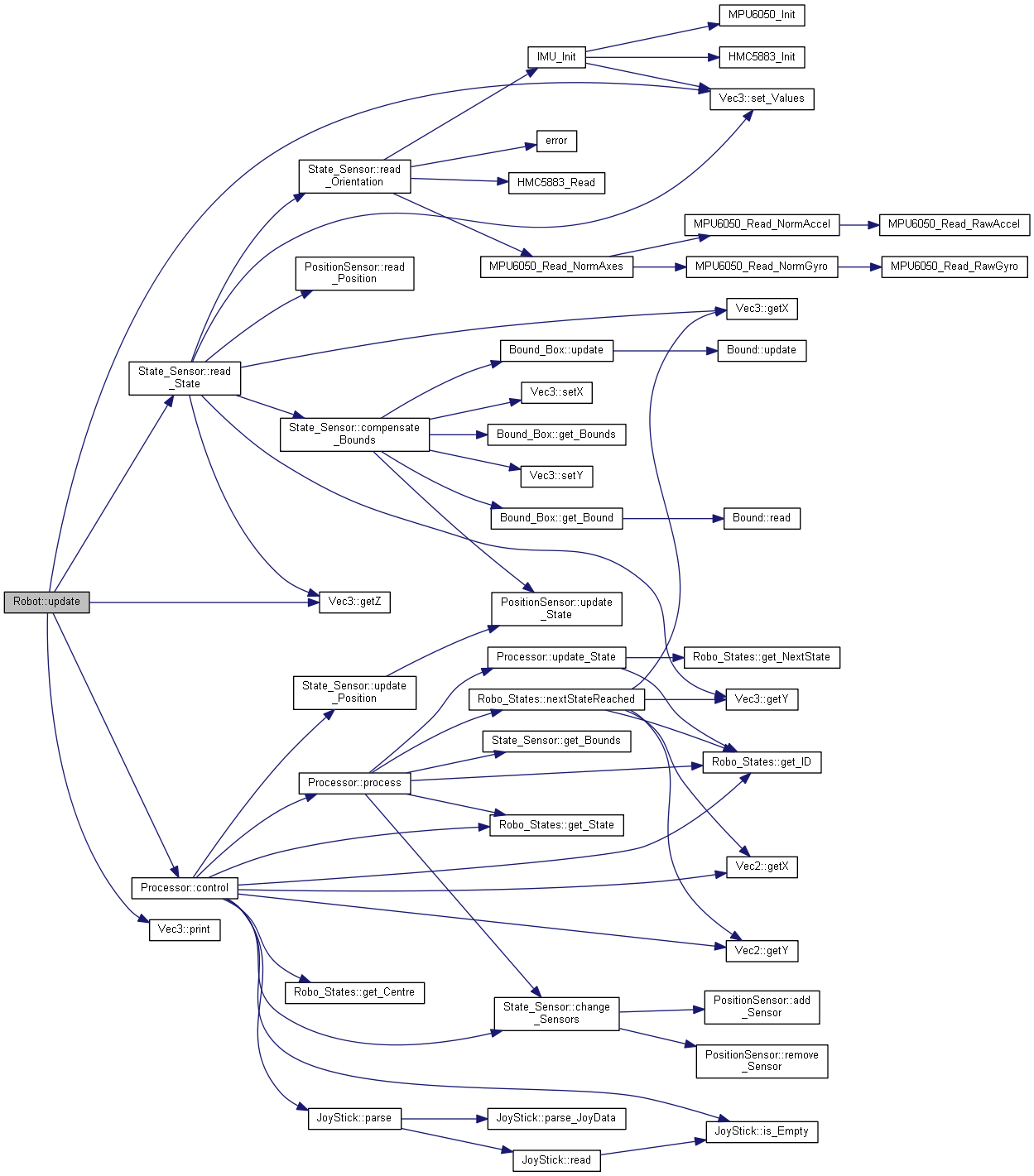
| void | update (uint32_t dt_millis) |
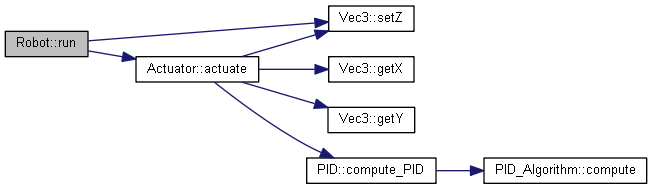
| void | run (uint32_t dt_millis) |
| bool | is_Initiated () const |
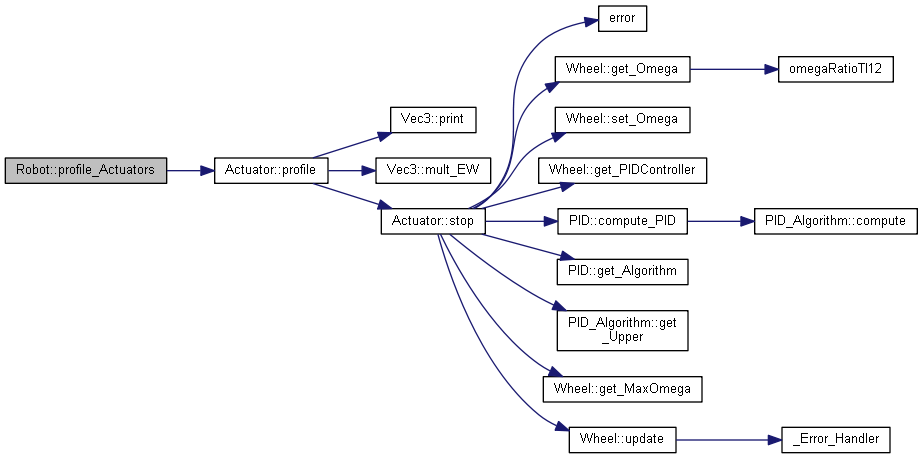
| void | profile_Actuators (Vec3< float > vel, uint32_t dt_millis) |
| void | check_Actuators () |
Static Public Member Functions | |
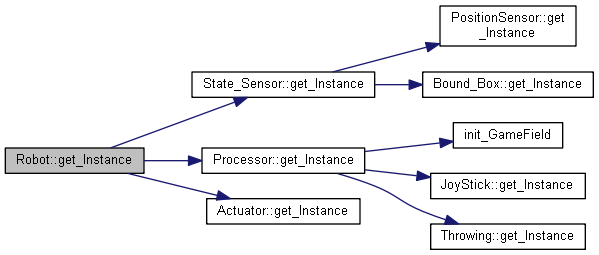
| static Robot & | get_Instance () |
Private Member Functions | |
| Robot () | |
Private Attributes | |
| State_Sensor * | sensor_ |
| Processor * | cpu_ |
| Actuator * | base_ |
| State_Vars * | robot_state_vars_ |
| Vec3< float > | state_ |
| Vec3< float > | state_from_base_ |
| Vec3< float > | velocities_ |
| Vec3< float > | psis_ |
| bool | initiated_ |
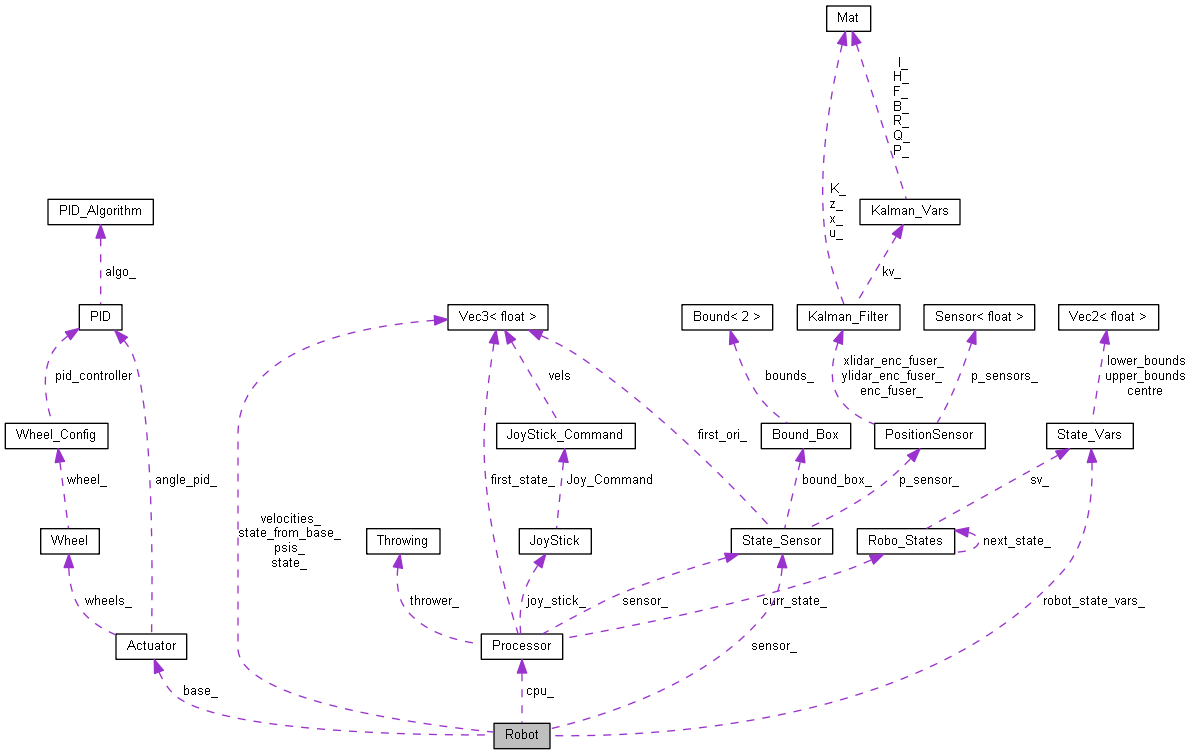
A Singleton class that handles all the robot's sequence.
Robot class is responsible for handling all the sequence to be taken by the Khangai Robot in the game field.
Tasks that can be delegated to the Robot class : 1) Read the robot's state, i.e, the position and orientation of the robot using the available OrientationSensor and PositionSensor. 2) Determine the next action to be taken by the robot. 3) Give motor commands and tune the motors. 4) Stop the robot using the appropriate ramping.
|
default |
|
default |
|
inline |
|
inlineprivate |
| void Robot::check_Actuators | ( | ) |

|
static |
| int Robot::init | ( | uint32_t | dt_millis | ) |

| bool Robot::is_Initiated | ( | ) | const |

| void Robot::profile_Actuators | ( | Vec3< float > | vel, |
| uint32_t | dt_millis | ||
| ) |
| void Robot::read_Field | ( | ) |


| void Robot::run | ( | uint32_t | dt_millis | ) |

| void Robot::update | ( | uint32_t | dt_millis | ) |

|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
 1.8.15
1.8.15