#include <processor.h>
◆ Processor() [1/3]
◆ Processor() [2/3]
◆ ~Processor()
| Processor::~Processor |
( |
| ) |
|
|
inline |
◆ Processor() [3/3]
◆ actuate_Arm()
| void Processor::actuate_Arm |
( |
bool |
act_arm | ) |
|
|
private |
◆ actuate_Platform()
| void Processor::actuate_Platform |
( |
bool |
act_arm | ) |
|
|
private |
◆ auto_control()
| Vec3< float > Processor::auto_control |
( |
Vec3< float > |
state, |
|
|
Vec3< float > |
vel_from_base, |
|
|
uint32_t |
dt_millis |
|
) |
| |
|
private |
◆ control()
| Vec3< float > Processor::control |
( |
Vec3< float > |
state, |
|
|
Vec3< float > |
vel_from_base, |
|
|
Vec3< float > |
last_vel, |
|
|
State_Vars *& |
robot_state_vars, |
|
|
uint32_t |
dt_millis |
|
) |
| |
◆ extend_Arm()
| void Processor::extend_Arm |
( |
| ) |
|
|
private |
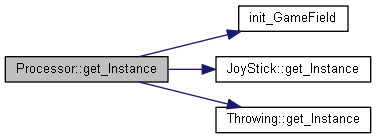
◆ get_Instance()
◆ grip_Shagai()
| void Processor::grip_Shagai |
( |
bool |
grip_shagai | ) |
|
|
private |
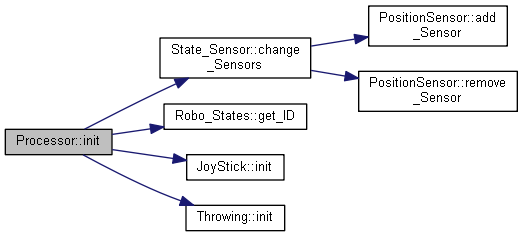
◆ init()
| int Processor::init |
( |
uint32_t |
dt_millis | ) |
|
◆ manual_control()
◆ operator=() [1/2]
◆ operator=() [2/2]
◆ pass_Gerege()
| void Processor::pass_Gerege |
( |
bool |
pass | ) |
|
|
private |
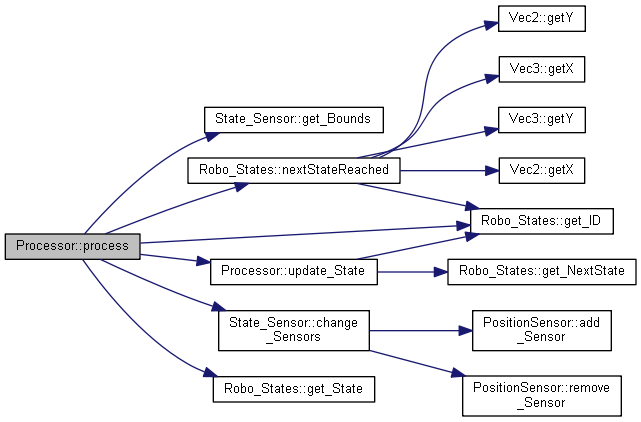
◆ process()
| void Processor::process |
( |
Vec3< float > |
state, |
|
|
State_Vars *& |
robot_state_vars |
|
) |
| |
|
private |
◆ reset_Position()
| void Processor::reset_Position |
( |
State_Vars *& |
robot_state_vars | ) |
|
|
private |
◆ retrieve_Arm()
| void Processor::retrieve_Arm |
( |
| ) |
|
|
private |
◆ rotate_Gerege()
| void Processor::rotate_Gerege |
( |
| ) |
|
|
private |
◆ send_ThrowCommand()
| void Processor::send_ThrowCommand |
( |
bool |
grip, |
|
|
bool |
throw_shg, |
|
|
bool |
act_arm |
|
) |
| |
|
private |
◆ throw_Shagai()
| void Processor::throw_Shagai |
( |
bool |
throw_shagai | ) |
|
|
private |
◆ update_State()
| void Processor::update_State |
( |
uint8_t |
bounds | ) |
|
|
private |
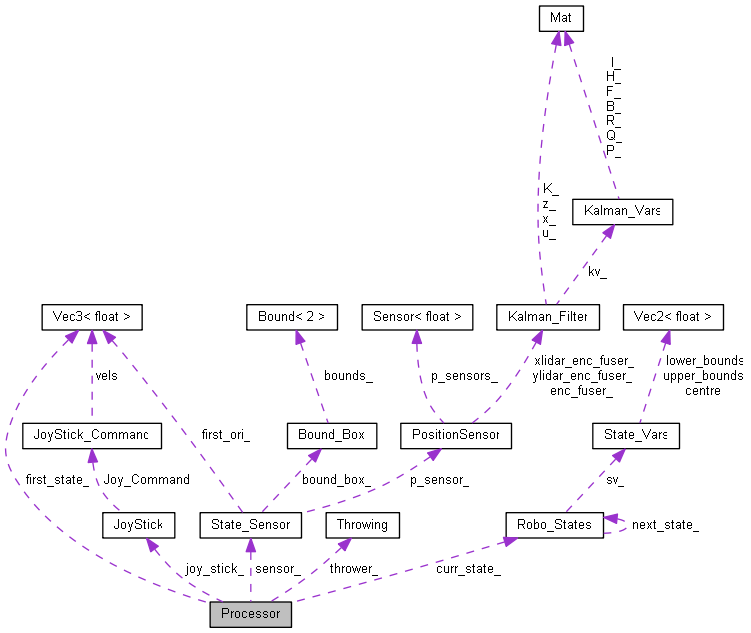
◆ curr_state_
◆ first_state_
| Vec3<float> Processor::first_state_ |
|
private |
◆ is_first_
| bool Processor::is_first_ |
|
private |
◆ joy_stick_
◆ sensor_
◆ thrower_
The documentation for this class was generated from the following files:
- C:/Users/073be/OneDrive/Documents/Robotics/Codes/beta/Khangai-Robot/Khangai-Robot-Full/KhangaiRobot-Play/Core/Inc/parts/processor.h
- C:/Users/073be/OneDrive/Documents/Robotics/Codes/beta/Khangai-Robot/Khangai-Robot-Full/KhangaiRobot-Play/Core/Src/parts/processor.cpp









 1.8.15
1.8.15