 |
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
|
Khangai Robot Play - Naive
01
THe naive play of the Khangai Robot
|
#include "a4988.h"#include "arduino.h"#include "freewheel.h"#include "hmc5883.h"#include "mpu6050.h"#include "encoder.h"#include "lidar.h"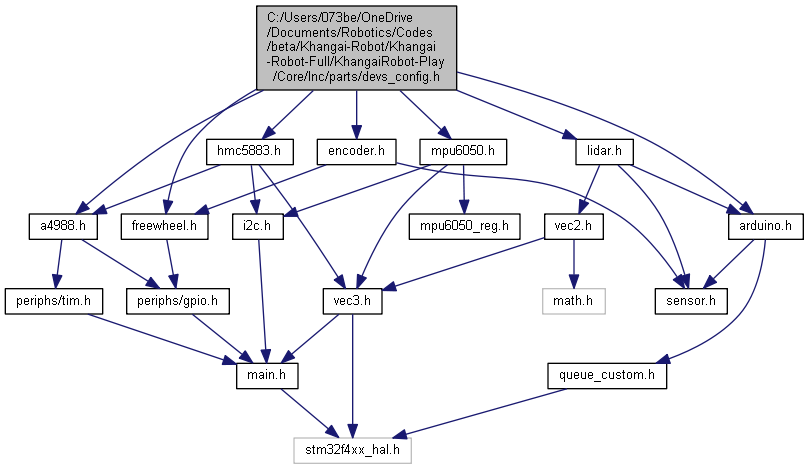

Go to the source code of this file.
Functions | |
| void | IMU_Init () |
| void | Stepper_Init () |
| void | Encoders_Init () |
| void | Lidars_Init () |
Variables | |
| const uint32_t | gMax_Robo_Velocity |
| const uint32_t | gRated_Robo_Velocity |
| Arduino_Device | gLED_Strip |
| struct MPU6050 | Body_IMU |
| struct HMC5883 | Body_HMC |
| struct A4988 | IMU_Stepper |
| struct Enc | gXEnc |
| struct Enc | gYEnc |
| Encoder | gXEncoder |
| Encoder | gYEncoder |
| Lidar | gXLidar |
| Lidar | gYLidar |
| void Encoders_Init | ( | ) |

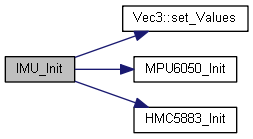
| void IMU_Init | ( | ) |
| void Lidars_Init | ( | ) |

| void Stepper_Init | ( | ) |

| struct HMC5883 Body_HMC |
| struct MPU6050 Body_IMU |
| Arduino_Device gLED_Strip |
| const uint32_t gMax_Robo_Velocity |
| const uint32_t gRated_Robo_Velocity |
| Encoder gXEncoder |
| Lidar gXLidar |
| Encoder gYEncoder |
| Lidar gYLidar |
| struct A4988 IMU_Stepper |
 1.8.15
1.8.15